Enabling the future of CFD for external aerodynamics optimization with exascale systems
The design of the car of the future requires going over the usual RANS approach, since it fails to predict with an acceptable prediction accuracy features like transitional flows, instabilities, noise gneration, combustion efficiency. This in turn requires exascale systems, to sustain more high-fidelity simulations techniques, like LES or DES. EXCELLERAT paves the way to this transition.Five years ago, a report1 sponsored by NASA documented the results of a study to address the long range, strategic planning required in the area of computational fluid dynamics (CFD), including future software and hardware requirements for High Performance Computing (HPC).
Specifically, the “Vision 2030” CFD study is provided a knowledge-based forecast of the future computational capabilities required for turbulent, transitional, and reacting flow simulations, and to lay the foundation for the development of a future framework and/or environment where physics-based, accurate predictions of complex turbulent flows, including flow separation, can be accomplished routinely and efficiently in cooperation with other physics-based simulations to enable multi-physics analysis and design.
Five years later, much still needs to be done, especially in application fields like automotive. The optimization of the external aerodynamics of a car is one of the most important fields of investigation. Traditionally, the interaction between the acr and the air is analyzed experimentally in wind tunnel setups, expensive and difficult to implement and manage. CFD is a suitable candidate for replacing experimental tests, but a validated high fidelity and cost-effective workflow is still missing.
At CINECA in the framework of EXCELLERAT we work on such a scenario, exploring how combining a open-source toolkit like FEniCS with adjoint-methods powered CFD solvers on exascale architecture might be a solution.
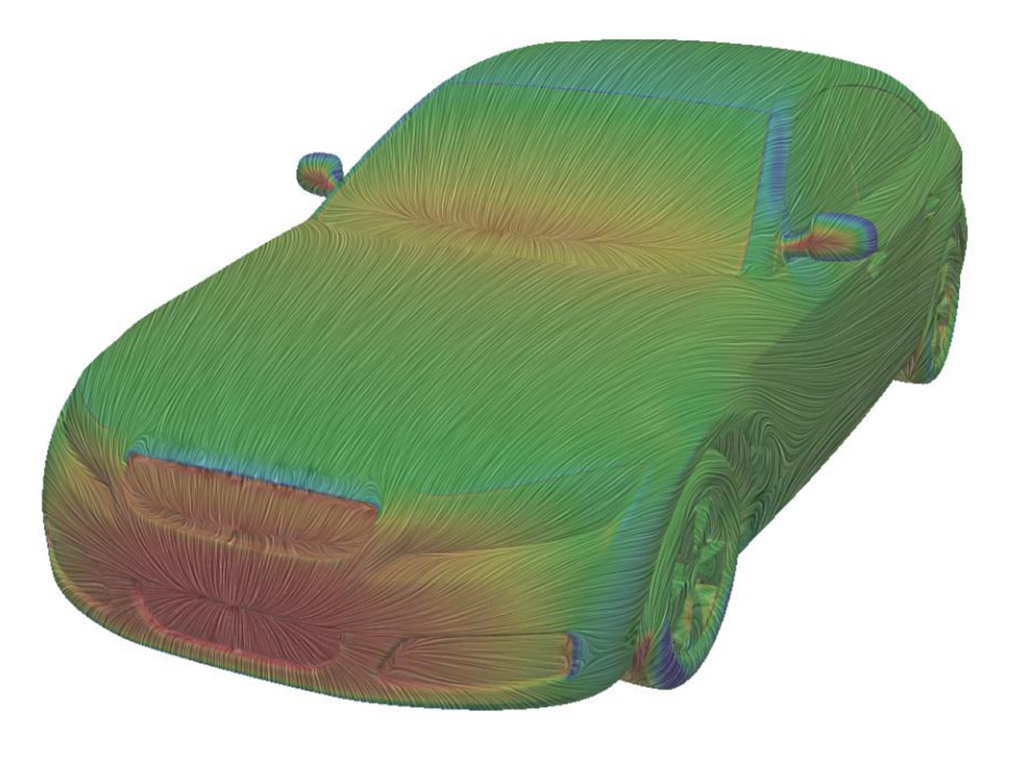
The analysis will be performed on the de-facto standard automotive benchmark, DrivAer produced by Technische Universitat Munchen. This is a far more complex geometry than has been considered previously, and is more representative of a real car. The model is designed as a modular vehicle with exchangeable rear end forms and underbodies, allowing for 18 different configurations. Furthermore, a wide body of data, experimental and numerical, is already available allowing a thorough comparison with other CFD tools.
FEniCS is a high-level problem solving environment for automated solution of partial differential equations (PDEs) by the finite element method. To manage the complexity of multiphysics problems FEniCS takes the weak form of a PDE as input in a near mathematical notation and automatically generates low-level source code, abstracting away implementation details and HPC concepts from domain scientists. FEniCS is supported by a large loosely coupled community, providing various versions of its core components. But while several implementations exist, its broad user base is connected by the common code generation capabilities, allowing users to easily move between various flavours within the community. FEniCS is further developed to be an Exascale ready pototyping framework thanks to EXCELLERAT.
Already some interesting result have been shown using Unicorn solver within the FEniCS environment. Moreover, looking at the evolving technology trends in CFD-based shape optimization chains, there is a strong request for robust and flexible adjoint optimization based solutions. FEniCS, thanks to his extremely ease of use and flexibility and to his python-based interface is a powerful tool to implement, test and interact with implementation of an adjoint CFD solver based on the Unicorn solver.